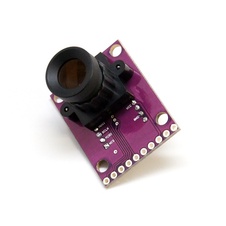
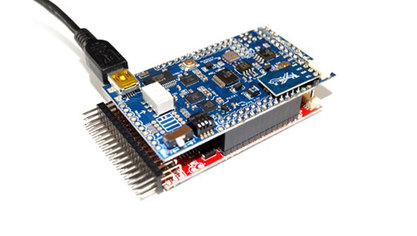
A new UAV/ MAV optical flow sensor has been released over at DIYdrones. This sensor will mainly be used for Arducopter Multi-rotor and traditional helicopters to improve position hold. This sensor is based on the ADNS3080 mouse sensor, and features a 8mm leans with 11deg FOV, ideal for low altitude position hold functions.
A library to use this sensor can be found here
This board has an SPI interface so it can be interfaced to many other micro controllers.
This optical flow sensor is also for sale in the UK from UnmannedTech
A library to use this sensor can be found here
This board has an SPI interface so it can be interfaced to many other micro controllers.
This optical flow sensor is also for sale in the UK from UnmannedTech






 RSS Feed
RSS Feed
